3D Spatial Calibration
Download Free
📐 3D Spatial Calibration
Your venue, mapped in millimetres.
ArUco markers on the stage floor calibrate camera positions in 3D space. Depth-Anything-V2 builds a point cloud of the full environment. RANSAC detects floor, walls, and obstacles. Moving heads auto-calibrate their pan/tilt ranges. All of this runs from the orchestrator with any USB camera.
What you get
ArUco marker detection runs on the orchestrator — any USB camera works solvePnP computes camera 3D pose from floor marker positions Depth-Anything-V2 monocular depth for environment point clouds RANSAC surface detection: floor, walls, and obstacle clusters Adaptive settle time: 0.8–2.5s with double-capture beam verification Boundary-aware BFS: auto-stops when beam leaves camera field of view Per-fixture light maps: (pan, tilt) → (x, y, z) in stage mm Stereo triangulation from 2+ cameras for 3D object tracking Point cloud and calibration data saved in .slyshow project files
Screenshots
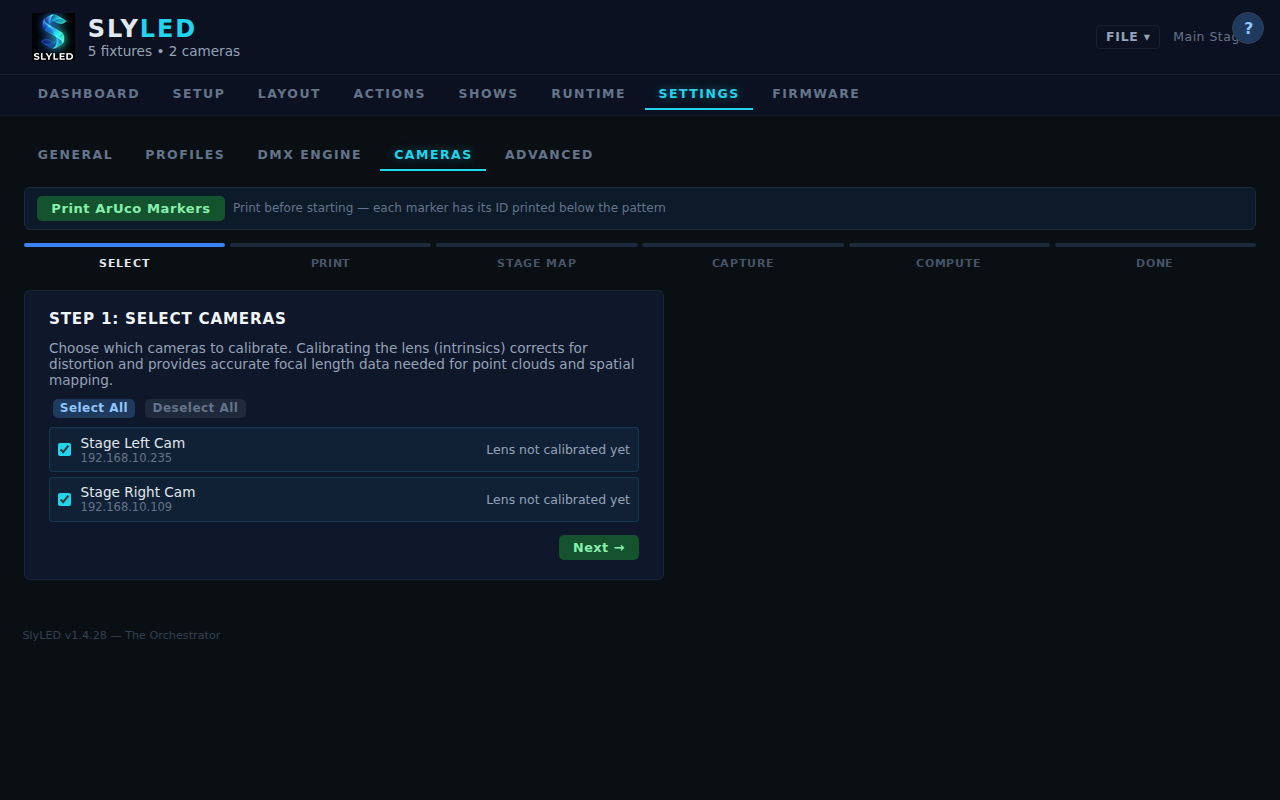
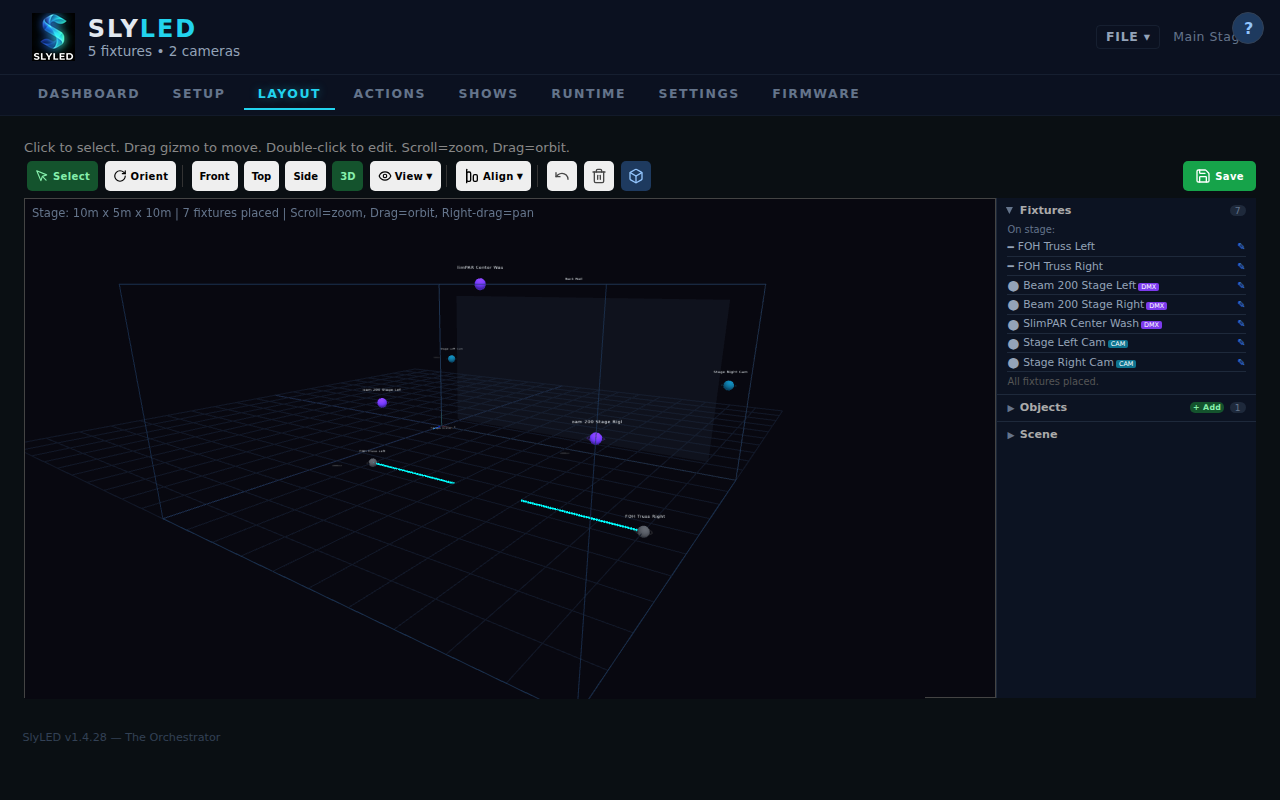
Camera calibration status in Settings 3D viewport with scanned point cloud and surfaces
Ready to try it?
Download SlyLED free. MIT licence. No subscription, no account, no cloud.